All Tags
AWS
ai
algorithm-design
architecture
browser
cloud
cloud-efficiency
cloud-principles
cost-reduction
data-centric
data-compression
data-processing
deployment
design
documentation
edge-computing
email-sharing
energy-efficiency
energy-footprint
enterprise-optimization
green-ai
hardware
libraries
llm
locality
machine-learning
maintainability
management
measured
microservices
migration
mobile
model-optimization
model-training
multi-objective
network-traffic
parameter-tuning
performance
queries
rebuilding
scaling
services
storage-optimization
strategies
tabs
template
testing
workloads
Tactic: Limit Task
Tactic sort:
Awesome Tactic
Type: Architectural Tactic or Software Practice
Category: resource-allocation
Tags:
workloads
Title
Limit Task
Description
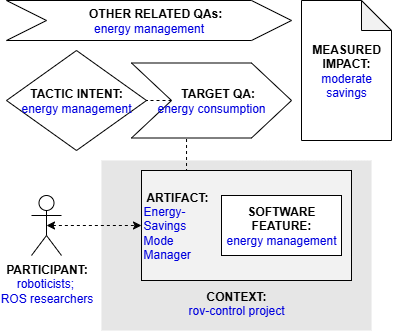
The Limit Task tactic configures a robot’s task to execute in energy-savings mode when energy levels reach a given threshold.
Participant
roboticists; ROS researchers
Related software artifact
Task Requester; Energy-Savings Mode Manager; Arbiter; Task Executor
Context
rov-control project
Software feature
energy management
Tactic intent
lower-power mode
Target quality attribute
energy consumption
Other related quality attributes
energy management
Measured impact
moderate savings
Source
Mining the ROS ecosystem for Green Architectural Tactics in Robotics and an Empirical Evaluation (DOI: 10.1109/MSR52588.2021.00042)Graphical representation